在假造世界里“跑”智驾,新风口上投资契机在那处
车圈的智驾戎行越来越大。仅看此次广州车展前后,车圈声量最大的,简直都是智驾和智能。
10月份,声称将“扔掉标的盘或踏板”特斯拉Robotaxi月朔亮相,就掀翻了公共的温雅高潮。11月15日,雷军在广州车展上发布小米超等智能驾驶HAD,成为面前最新一家端到端大模子“上车”的车企。截止面前,除了首先应用端到端大模子的特斯拉,中国的生机、蔚来、华为、小鹏、智己、小米等多家车企也已晓示竣事端到端“上车”。就连老牌车企也不甘零丁,广汽丰田应用Momenta的智驾,以致喊出了“有路就开广丰智驾”的标语。

同期伴生的,是在这个全壮盛态领域中,出身出来的各式新兴投资契机,上汽产业金融投资也运转猛烈布局,身影出当今一家2023年12月新开采的自动驾驶芯片研发商的鼓动名单中。
风口来了,围绕端到端和东谈主工智能,总有先驱会先站上去的。
在假造世界里“跑”智驾的大模子


以上这段看似实拍的视频,其实是蔚来对世界模子期间的一次尝试:扫数视频从第4秒运转,都是由“蔚下世界模子NWM”联想生成的。尽管面前期间尚不锻练,但基于3秒钟视频的Prompt(领导)输入,蔚下世界模子依然不错生成120秒联想的视频。蔚来于2024年7月27日崇拜发布这一生界模子,不错全量贯通讯息、生成新的场景,以致商量改日可能发生的事件。
端到端,昭着给智驾行业带来了无尽的联想力。但是,端到端大模子的试验依赖多量优质数据,而世界模子的应用有望以低成本、高服从的技能,为端到端大模子的试验提供海量优质数据。
相较于模块化遐想架构,端到端遐想架构不再有考虑与适度这些东谈主为遐想的模块,车辆的运行决策一王人交给神经收集大模子处理,因此不再需要工程师写下海量的代码。以特斯拉FSD为例,端到端大模子的“上车”,让智驾系统从V11版块的30万行代码精简到了V12版块的2000行代码,但智能驾驶的证据却有了显耀进步,确切竣事了“像东谈主类司机相通”驾驶。
这恰是开脱了代码规章拘谨后产生的成果。传统的模块化遐想就像驾校里的生手司机,只会本分守己施行“教师”(即工程师编写的代码)的指示。因此,碰到“教师”教过的场景,智驾系统不错应付。但是,一朝碰到莫得规章率领的Corner Case(边角案例),车辆就会不知所措,短期内不错通过加多规章来得志更多的场景需求,但很容易触达瓶颈和上限。而秉承端到端遐想架构的智驾系统像是离开驾校,我方启程的生手司机,不再有“教师”发出指示,智驾系统依靠端到端大模子自主判断并作念出决策,渐渐成长为“老司机”,让车辆的智能驾驶得到更高的上限。
现时,端到端自动驾驶期间的发展奉命渐进的旅途:在感知模块,多家车企依然通过“BEV(俯瞰视角)+OCC(占用收集)+Transformer(一种基于自戒备力机制的神经收集模子)”的“组合拳”竣事了端到端架构;决策模块也在渐渐从依赖手写规章向基于深度学习的模式滚动。

BEV+OCC线路图
图源自小鹏汽车
不外,面前中国企业关于端到端自动驾驶研发的策略存在不合,“上车”的进程也不一致:华为、小鹏等企业仍然秉承感知和考虑适度两段的“模块化端到端”,两个大模子之间依然存在规章连续;生机、蔚来、智己、商汤绝影等企业则秉承“一段式端到端”(也被称为“单一模子端到端”),从原始信号输入到最终考虑轨迹的输出径直秉承单一深度神经收集竣事。前者确立规章,将大模子黑盒作念了灰盒化,模子可讲解性更好;后者数据信息丢失更少,上限更高。
世界模子为自动驾驶
打造云上乾坤
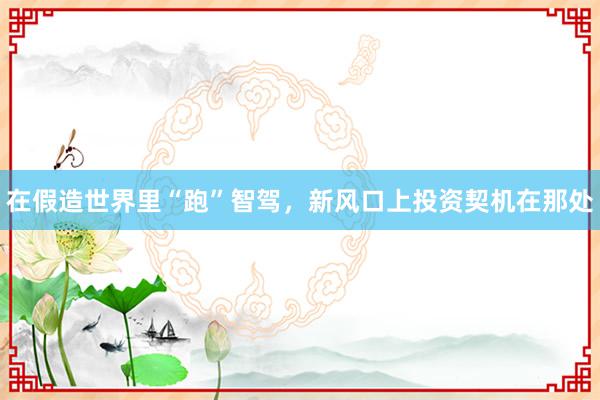
值得戒备的是,特斯拉固然是最早公布秉承端到端智驾有考虑的车企,但并未标明他们秉承的是“一段式端到端”如故“模块化端到端”架构。不外,从马斯克在酬酢媒体上的一些表态臆想,特斯拉所秉承的端到端模子,可能是一种基于生成式东谈主工智能、更高等的端到端大模子。
马斯克曾线路
特斯拉能应用车辆数据
生成模拟实际世界的视频
生成式东谈主工智能模子要处理的中枢问题是数据问题。大模子就像一位资质极高的学生,但需要多量的“学习尊府”,也就是数据进行试验。不外,能够用于试验的数据并未几见。马斯克曾线路,千人一面的深广行驶数据价值极低,灵验性可能不及万分之一。但是,若是用事故数据试验端到端模子,能适应的工况也有限。
以ChatGPT、Sora为代表的生成式东谈主工智能大模子为端到端大模子的试验带来了启发。“数据蚁合车队跑100万公里都不一定会碰到‘两辆卡车相撞,其中一辆侧翻’的场景。但是,通过大模子,只需要以相应的文本输入,一段对应的驾驶场景视频就能飞快生成。”上汽创投(上汽金控全资子公司)投资司理丁华宇线路,“特斯拉FSD以30秒傍边的视频当作试验素材,多模态大模子不错飞快生成这种顶点工况的行驶数据,匡助试验模子。”
值得戒备的是,这里所用的并不是传统的生成式模子,而是更逼近现时东谈主工智能领域前沿的“世界模子”(World Models)。二者的区别在于:传统的生成式模子大概能够准确商量篮球落地后会弹跳,但模子并不确切贯通其中的原因,“弹跳”的完毕是基于神经收集的概率推理给出最有可能适应预期的谜底。世界模子则具有基本的物理剖析,更善于展现“篮球真实切弹跳”。换言之,世界模子能够为东谈主工智能提供贯通确切的三维物理世界的才略,能够像东谈主相通感知确切世界。这与马斯克所说的“能够期骗精准的物理学常识生成实际世界视频”殊途同归,也盘曲讲解了特斯拉在智能驾驶感知中排斥激光雷达的原因:并非成本高,而是激光雷达的数据与视频数据维度不同且更复杂,面前难以将激光雷达数据应用到特斯拉的世界模子中。

特斯拉Robotaxi
秉承纯视觉感知有考虑
由此看来,世界模子在端到端大模子试验中的上风十分昭着:一是不错低成本生成海量接近确切的、包含Corner Case的千般化试验视频数据;二是模拟物理世界更确切,不错匡助智驾模子在感知端的时空贯通才略、环境联想真实切度与丰富度显耀进步;三是具备推理和贯通的才略基础,模子不错我方推理学习因果,不再需要标注,泛化才略大幅度进步。
“世界模子的最终步地不错贯通为一个大模子的仿真器。有价值的Corner Case依靠实车蚁合比拟难且成本腾贵,依靠面前的仿真期间又不太准,是以依靠世界模子仿真提供试验素材是一个念念路。此外,世界模子还不错用于推理和决策。”丁华宇线路。
投资契机在智驾推理芯片
智能驾驶罕有据、算法、算力中枢三个身分,上文区别从端到端大模子(即算法)与世界模子(即数据)两个方面探讨了智能驾驶领域的前沿动态。不外,算力亦然拦阻淡薄的身分。
“端到端模子愈加依赖Scaling Law(圭臬定律),即通过加多数据参数目、模子试验时刻生成更大边界、更强性能的模子。以GPT为例,试验GPT-3大模子(1750亿参数)需要1000张A100 GPU一个月的算力,而试验GPT-4大模子(1.8万亿参数)等效需要25000张A100 GPU 三个月以上的算力。模子高度依赖算力边界进步迭代速度。”丁华宇告诉记者。
换句话说,这是一个“自超过遗址”的进程,不管是端到端模子如故世界模子,算力与性能径直挂钩。改日,智驾领域新一轮算力武备竞赛将在车端与云表共同伸开,面前中国依然在追逐起首者。
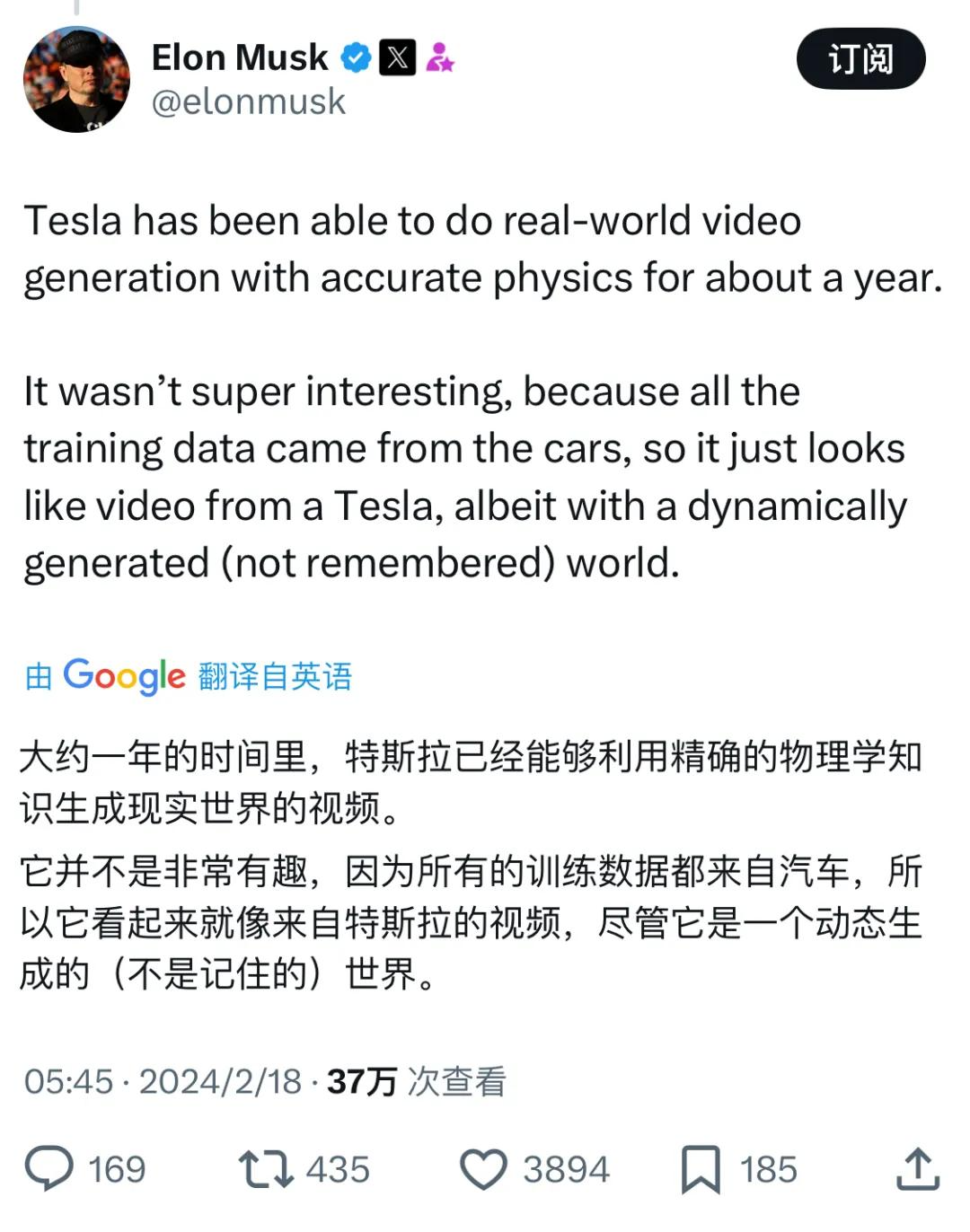
在算力边界方面,特斯拉在自研的超等规划机Dojo量产后,算力边界飞快攀升到公共前五的水平,并有望于本年达到100EFLOPS(1000万亿次浮点运算)的算力边界。面前,中国企业中,即等于算力边界位居前线者,也过时特斯拉1-2个数目级。可当作对比的是,工信部对世界算力的考虑是:到2025年,世界算力边界超过300EFLOPS,届时特斯拉的算力边界终点于世界算力的1/3。
特斯拉于2023年7月量产Dojo
面前已竣事100 EFLOPS算力
图源自Tesla AI推特
而在算力芯片方面,中国与好意思国的合座差距宽绰。面前,大模子的云表试验芯片依然是英伟达一家独大的场合;但是,在车端的智驾推理芯片方面,国产替代有考虑正渐渐走向锻练,产业链上出现了能得志整车厂智驾有考虑的车载芯片,也袒深切一批产业投资契机。
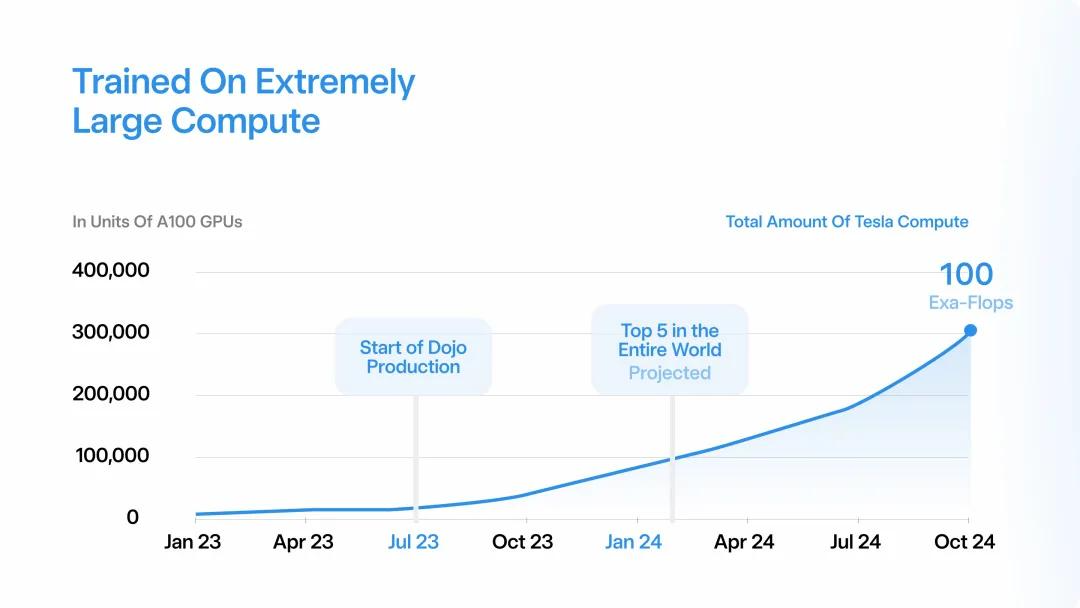
10月24日,上汽集团投资的智驾科技企业地平线在香港交游所主板挂牌上市,募资总数达54亿港元,成为港股本年以来最大的科技IPO。当作面前国内最大边界量产智能驾驶处理有考虑的供应商,地平线征途6系列智能规划有考虑“首发即爆款”,已得到10家车企及品牌量产勾通,将于2025年竣事超10款车型量产托付。
地平线征途6系列智能规划有考虑
“投早、投小、投科技”,除了肖似地平线这种在行业内赫赫闻明的企业,上汽产业金融投资还在不断发掘更多有远景、有价值的投资标的,以产业金融投资赋能产业发展、陪同已投企业成长。
开采于2023年12月的自动驾驶芯片研发商新芯航途是一个典型案例。新芯航途背靠Momenta,况且眩惑了无数前OPPO旗下哲库东谈主才与前华为昇腾SoC团队,领有强劲的期间实力与改日后劲。跟着汽车智能化、网联化的加快发展,自动驾驶芯片市集边界将络续扩大,为企业带来更多机遇。近期,新芯航途完成一轮融资,上汽创投现身鼓动名单,陪同企业开启自研智驾芯片的征途。
借助产业金融投资,上汽集团战术直投在新赛谈上跟踪行业最新动态,积极拓宽幅员、发掘契机,全面布局汽车产业链、变嫌链、价值链,不断加强与产业链陡立游的战术勾通,打造围绕上汽在新赛谈上密致定约的中枢生态圈。温雅前沿期间,把捏“早小”契机,上汽集团战术直投正奋力于加大协同、加深赋能,以CVC产业成本为纽带,助力上汽与已投企业共同竣事双向赋能和价值共创。